

Dénombrer les polyèdres réguliers
Comment compter le nombre possible de polyèdres réguliers ? Cette question se résout très simplement avec la formule d'Euler !
Un polyèdre est régulier si toutes ses faces sont des polygones réguliers (avec p côtés), et si à chaque sommet concourent le même nombre q de faces. Chaque face fournit p côtés, qui se groupent deux à deux pour former A = p (F / 2) arêtes. À chaque sommet se rejoignent q arêtes, donc A = q (S / 2) ; n'oublions pas qu'une arête possède deux extrémités. Remplaçons les expressions de S et F par leurs expressions en A dans la formule d'Euler F + S = A + 2 ; on obtient 2A / p + 2A / q = A + 2. Factorisons et réduisons au même dénominateur ; il vient A (2p + 2q – pq) / pq = 2. Ajoutons et retranchons 4 dans la parenthèse, pour trouver A (4 – (p – 2)(q – 2)) / pq = 2.
Comme A, p et q sont des entiers strictement positifs, une telle relation n'est possible que si (p – 2)(q – 2) < 4. En outre, puisque p ≥ 3 et q ≥ 3, les seuls cas admissibles sont les suivants :
|
p |
q |
Polyèdre |
A |
S |
F |
|
3 |
3 |
Tétraèdre |
6 |
4 |
4 |
|
3 |
4 |
Octaèdre |
12 |
6 |
8 |
|
3 |
5 |
Icosaèdre |
30 |
12 |
20 |
|
4 |
3 |
Cube |
12 |
8 |
6 |
|
5 |
3 |
Dodécaèdre |
30 |
20 |
12 |
L'arithmétique nous fournit ainsi cinq polyèdres réguliers possibles. Les contraintes géométriques ne réduisent pas cet ensemble : il existe donc bien cinq tels solides, dits de Platon.
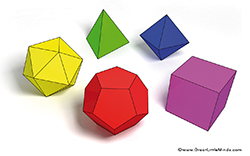
Le cube (en violet), le dodécaèdre (en rouge), l'icosaèdre (en jaune),
le tétraèdre (en vert) et l'octaèdre (en bleu).
La formule d'Euler–Poincaré–Schläfli
Henri Poincaré et Ludwig Schläfli ont réussi à généraliser la formule d'Euler, qui est valable dans l'espace de dimension 3, pour tout d-polytope, c'est-à-dire pour tout polyèdre convexe borné de dimension d (ce qui désigne une intersection d'un nombre fini de demi-espaces fermés dans l'espace à d dimensions). Cette généralisation fournit, pour un d-polytope P, une relation entre les nombres de k-faces (pour 0 ≤ k ≤ d – 1) de P. On dispose en effet de cette jolie formule, dans laquelle fk (P) désigne le nombre des k-faces de P :
Lorsque d = 2, P n'est autre qu'un polygone convexe ; ses 0-faces en sont les sommets et ses 1-faces coïncident avec les côtés. La formule, qui s'écrit f0 (P) = f1 (P), indique que P possède autant de sommets que de côtés.
Pour d = 3, on retrouve la formule d'Euler : S = f0(P), A = f1 (P) et F = f2 (P).
Pour d = 4, la somme du nombre de sommets et du nombre de faces planes vaut la somme du nombre d'arêtes et du nombre de faces tridimensionnelles. Ce résultat peut être vérifié sur les six types de 4-polytopes réguliers (les polychores), qui sont les analogues des polygones réguliers en dimension 2 ou des solides platoniciens en dimension 3. Chaque polychore étant apparenté à un polyèdre régulier (sauf l'hypergranatoèdre, ou 24-cellules), son nom est construit en plaçant le préfixe « hyper » avant le nom du polyèdre correspondant.
|
Polychore |
Nombre de sommets |
Nombre d'arêtes (k = 1) |
Nombre |
Nombre |
|
Hypertétraèdre |
5 |
10 |
10 (triangles) |
5 (tétraèdres) |
|
Hypercube |
16 |
32 |
24 (carrés) |
8 (cubes) |
|
Hyperoctaèdre |
8 |
24 |
32 (triangles) |
16 (tétraèdres) |
|
Hypergranatoèdre |
24 |
96 |
96 (triangles) |
24 (octaèdres) |
|
Hyperdodécaèdre |
600 |
1 200 |
720 |
120 |
|
Hypericosaèdre |
120 |
720 |
1 200 (triangles) |
600 |
L'hyperplan d'Euler
On peut donner une élégante interprétation géométrique de la formule d'Euler–Poincaré–Schläfli en faisant appel au vecteur f (P) = ( f0 (P), f1 (P), f2 (P)… fd–1(P)), appelé f-vecteur associé à P, et à l'hyperplan d'Euler H défini par l'équation
Les f-vecteurs de tous les d-polytopes sont situés dans H, mais ils n'appartiennent pas tous à un même sous-espace de dimension inférieure à d – 1.
Ainsi, dans l'espace de dimension 3 (où x0 = x, x1 = y et x2 = z), H est le plan d'équation x – y + z = 2 ; tous les f-vecteurs appartiennent à ce plan, mais ils ne sont pas tous inclus dans une même droite. Dans l'espace de dimension 4 (où les coordonnées des points sont souvent notées x, y, z et t), les f-vecteurs de tous les 4-polytopes appartiennent au sous-espace tridimensionnel défini par l'équation x + z = y + t, mais ne sont pas situés dans un même plan.