

Il n'existait pas un seul robot quand Henri Poincaré est mort en 1912. Cependant, le célèbre mathématicien français peut être considéré comme l'un des grands penseurs de la robotique : l'objet abstrait « géométrie » est au cœur de ce secteur d'activité. Les plus hautes abstractions qu'ait pu produire l'esprit humain en matière de mathématiques pures peuvent ainsi avoir des conséquences éminemment pratiques.
Agir par le mouvement
Qu'est-ce qu'un robot ? C'est en première approximation une « grande marionnette » dont les pièces peuvent tourner les unes par rapport aux autres aux coudes, aux genoux, aux chevilles, au torse…, qui possède donc un certain nombre de degrés de libertés de rotation, chacun commandé par un moteur, le tout piloté par un ordinateur.
 Le terme « robot » apparaît pour la première fois en 1920 dans une pièce de science-fiction du dramaturge tchèque Karel ?apek. Le mot a été créé par son frère Josef à partir du mot robota, qui signifie en tchèque « travail ». Quant au mot « robotique », l'auteur de science-fiction Isaac Asimov l'a forgé sans y prendre garde en 1941. Il croyait que le terme existait déjà, comme « electronics » !
Le terme « robot » apparaît pour la première fois en 1920 dans une pièce de science-fiction du dramaturge tchèque Karel ?apek. Le mot a été créé par son frère Josef à partir du mot robota, qui signifie en tchèque « travail ». Quant au mot « robotique », l'auteur de science-fiction Isaac Asimov l'a forgé sans y prendre garde en 1941. Il croyait que le terme existait déjà, comme « electronics » !
Le développement prodigieux des technologies de l'information et de la communication (les TIC) conduit parfois à penser qu'elles englobent la robotique. Ce n'est pas le cas. La différence tient en un mot : la gravité. Un robot est une machine qui dialogue avec la gravité (et parfois avec d'autres forces) : en robotique, on n'est pas dans le virtuel, on est dans la physique du monde.
Si la robotique utilise les TIC, c'est pour les mettre au service d'une grande tradition historique, celle de faire des machines. La principale caractéristique d'une machine, c'est le mouvement. Le mouvement, c'est aussi ce qui permet de classer les objets naturels en trois catégories : les objets inertes, les plantes et les animaux. Les végétaux et les animaux ont en commun le mouvement, la différence étant que les animaux sont capables de déplacement : à la différence des végétaux, ils ne trouvent pas sur place ce dont ils ont besoin.

Objets inertes. Plantes. Animaux.
Les machines créées par l'homme peuvent se classer de façon similaire en outils, robots industriels et robots mobiles.



Outils Robots industriels Robots mobiles
(« machines inertes »). (« machines-plantes »). (« machines-animaux »).
L'objet de la robotique, c'est d'agir par le mouvement. Comme nous aussi, nous dialoguons avec la gravité, la question de comment nous bougeons et nous agissons se pose. Est-ce qu'on connaît tout de nous-mêmes ? C'est en ce sens que la robotique est passionnante : elle va interroger les mathématiques, la rhétorique, la danse : comment un chorégraphe parle-t-il d'un mouvement, comment décrit-il un mouvement à un danseur ? C'est le pendant de la question suivante : comment programmer un robot ?
L'espace et la géométrie
L'Espace et la Géométrie est le titre d'un fameux article de Poincaré (Revue de métaphysique et de morale 3, 1895). La principale leçon de cet article est que les mots « espace » et « géométrie » doivent désormais être utilisés au pluriel.
Poincaré revient aux origines de la géométrie : il montre que le mouvement est à l'origine de la géométrie. La géométrie classique est définie par le fait qu'il existe des corps solides dans l'espace. Quelle est la transformation qui fait passer d'une bouteille posée sur une table à la même bouteille tenue quelques instants plus tard par la main qui l'a saisie ?


Suivons-la des yeux : elle change de forme sur notre rétine, nos muscles oculaires sont en action, et sur la base de ces informations sensorielles nous comprenons qu'un phénomène se déroule. L'analyse de ce phénomène, via des mécanismes d'abstraction, conduit selon Poincaré aux notions fondamentales de la géométrie. Il parle très précisément de deux types d'espaces : l'espace géométrique (le réel, qui nous est extérieur) d'abord ; mais il y a aussi l'espace représentatif (qui nous appartient, et qui possède trois composantes : visuelle, tactile et motrice, si l'on oublie les autres sens). Suivons son raisonnement :
« Ce qui est l'objet de la géométrie, c'est l'étude d'un “groupe” particulier ; mais le concept général de groupe préexiste dans notre esprit, au moins en puissance. Il s'impose à nous, non comme forme de notre sensibilité, mais comme forme de notre entendement. »
On est bien dans les mathématiques !
« Seulement, parmi tous les groupes possibles, il faut choisir celui qui sera pour ainsi dire l'étalon auquel nous rapporterons les phénomènes naturels. L'expérience nous guide dans ce choix qu'elle ne nous impose pas ; elle nous fait reconnaître non quelle est la géométrie la plus vraie, mais quelle est la plus commode. »
On dirait une phrase d'ingénieur !
Quelle géométrie allons-nous prendre ? Pour expliquer qu'il y a plusieurs formes possibles d'espaces à trois dimensions, Poincaré montre plusieurs formes d'espaces à deux dimensions (qui sont le bord d'un objet à trois dimensions) : la peau d'une orange est ainsi le bord de l'orange. Par analogie, un espace à trois dimensions peut être le bord d'un objet à quatre dimensions, et il y en a de très divers…
Les espaces de l'action
Le mouvement est à l'origine de l'action, il est aussi à l'origine de la géométrie. Peut-on envisager une « géométrie de l'action » ? Pour prendre un verre, il faut saisir (verbe d'action) le verre en main. Nos organes de perception nous permettent de le localiser. Comme machine-animal, le corps se déplace vers le verre, la main se tend, on saisit le verre…
Quels sont les espaces qui sont interviennent ? Il y a déjà l'espace physique, dans lequel se situe le verre. Il y a ensuite l'espace sensoriel (il a fallu que l'on voie, que l'on touche, que l'on sente la résistance de l'objet saisi…). Il y a enfin l'espace moteur.
L'action est définie dans l'espace physique. L'espace sensoriel est constitué des données fournies par les cinq sens de l'homme, en y ajoutant le sens de l'équilibre, qui donne la référence à la verticale, et qui se situe techniquement dans le système vestibulaire. Enfin, comme on possède plus de sept cents muscles, notre espace moteur comporte sept cents dimensions au moins. Tous ces espaces doivent dialoguer pour que l'action se réalise, le dialogue étant pris en charge par le cerveau et le système nerveux.
Pour le robot humanoïde, cela se passe exactement de la même manière ! Il y a quatre caméras, des capteurs d'efforts aux chevilles et aux poignets, des gyromètres, des accéléromètres (qui donnent des informations similaires à celles du système vestibulaire). L'espace sensoriel possède ainsi un grand nombre de dimensions (tout comme chez l'homme), et l'espace moteur a autant de dimensions qu'il y a d'articulations, c'est-à-dire de variables angulaires.
Tout le problème du roboticien est de calculer le mouvement adéquat pour la réalisation de l'action. Ce mouvement, si facile à décrire (prendre le verre), est d'une extraordinaire complexité. Il prend sa source dans un espace de dimension 700. Et Poincaré nous dit : « Prends la géométrie la plus commode ! »
Le calcul du mouvement
Qu'est-ce qui fait la relation entre espace moteur et espace physique ? Pour notre objet, qui n'est pas solide, rappelons-le, mais qui est articulé et déformable, il faut distinguer deux notions : placement et posture. Le placement nous renseigne sur où est situé l'objet dans l'espace, et la posture nous dit quelle est sa forme : le corps a une forme, il se déforme sous l'action des muscles, et agir c'est toujours déformer son corps.
Pour représenter schématiquement la posture, nous avons des variables angulaires sur le squelette, les angles entre les différents segment du corps. Ce sont des variables qui nous appartiennent. Pour le robot, on agit directement sur les variables angulaires. Chez l'animal, les angles sont déterminés par la tension des différents muscles.
Pour définir le placement d'un être humain (ou d'un robot, d'une roue, d'une voiture…), il suffit de deux coordonnées dans le plan et d'une variable d'orientation. Ces variables ne nous appartiennent pas. Nous n'avons pas de moteur pour les changer, et c'est toujours indirectement, par des changements de forme, que l'on se déplace dans l'espace.
La notion d'espace de configuration, empruntée à la mécanique, réunit les placements et les postures. C'est dans cet espace « articulaire », et non dans l'espace physique, que l'on va calculer le mouvement.
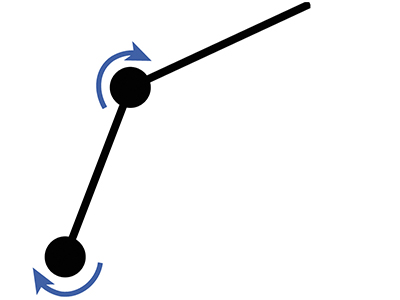
Ainsi, positionner un système de deux barres nécessite deux angles. L'espace articulaire est [0, 2π] × [0, 2π] (en identifiant 2π et 0, comme dans le jeu de Pac-Man où quand on sort à gauche, on rentre à droite ; quand on sort en haut, on revient par en bas). Géométriquement, on identifie dans le carré les côtés opposés, ce qui produit un tore. On a migré dans un monde idéal, mathématique : le robot devient un simple point dans cet espace.
Mouvement dans l'espace physique.
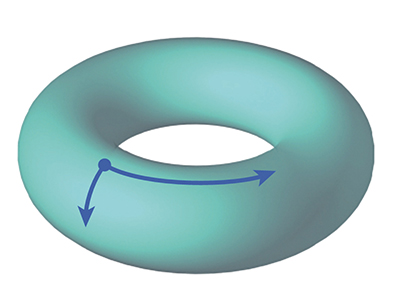
Mouvement dans l'espace de configuration.
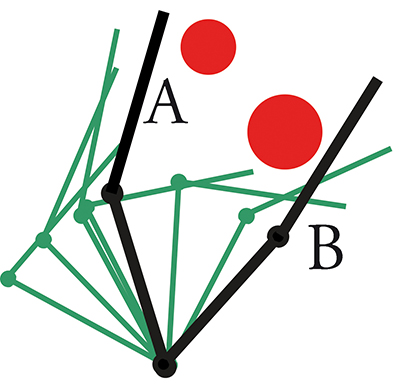
On peut poser au robot (ou plutôt à son ordinateur) des problèmes difficiles : calculer un mouvement qui passe d'une position à une autre en évitant les obstacles (c'est le fameux problème du déménageur de piano). Dans l'espace de configuration, ce problème va se transformer en le problème du déménageur de balle de ping-pong. Ici, on demande de passer de la position A à la position B en évitant les obstacles. L'industrie automobile fonctionne de cette manière : peut-on faire entrer un siège dans un habitacle donné ? Si c'est un robot qui doit se charger de l'opération, des logiciels sont développés pour le piloter.
Mouvement avec obstacles (en rouge) dans l'espace physique.
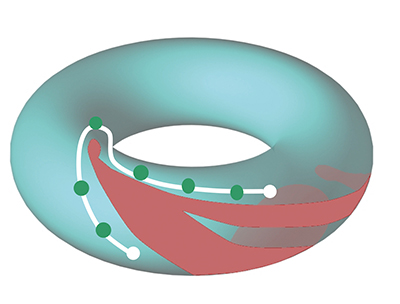
Mouvement avec obstacles (en rouge)
dans l'espace de configuration.
Comment se font ces calculs ? Pour porter une pomme à votre bouche, vous pouvez calculer les coordonnées x, y, z de la pomme que vous tenez dans votre main en fonction des angles de votre épaule, de votre coude, de votre poignet… et faire évoluer ces angles de façon à ce que la pomme se rapproche de votre visage. C'est ce que font les roboticiens dans l'industrie. Mais comme on peut jouer avec des dizaines de paramètres, il y a trop de trajectoires possibles. On en singularise une en choisissant un critère à optimiser. L'être vivant, de son côté, va adopter une approche sensori-motrice, consistant à faire grossir l'image de la pomme sur la rétine, avec contrôle et rectification de la trajectoire à chaque instant.
La non-holonomie
Si on ne peut pas se déplacer dans l'espace en changeant la valeur de variables qui nous appartiennent, comment fait-on alors ? Prenons une roue d'une voiture. Il n'y a qu'une variable de posture : l'angle dont elle tourne. Il faut poser la roue sur le sol pour que, grâce au frottement, au mouvement de rotation s'ajoute un mouvement de translation. C'est un phénomène universel :
Déplacement = action sur les variables de posture + frottement.
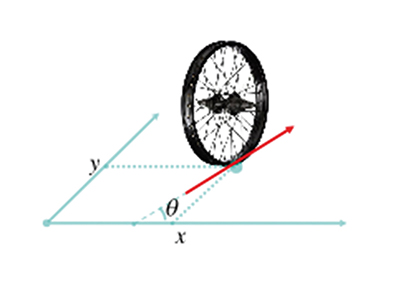
Le placement de la roue est défini par deux coordonnées (x, y) de position et une variable θ d'orientation. Mais tous les mouvements dans l'espace des placements ne sont pas possibles : la roue ne peut pas se mouvoir perpendiculairement à elle-même, elle ne peut que rouler dans la direction qu'elle indique.
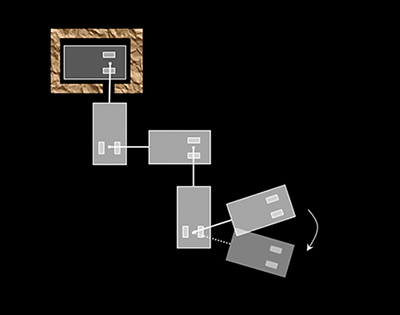
Chariot avec quatre remorques.
Les mouvements infinitésimaux du point représentant la roue dans l'espace des placements sont contraints : ils forment un espace de dimension 2. Pourtant, on peut, partant d'un point donné, atteindre tous les points de l'espace des placements, qui est de dimension 3. Vous savez comment faire : on manœuvre ! Mathématiquement, une « manœuvre », c'est une opération du type « A, puis B, puis inverse de A, puis inverse de B ».
Tourner le volant, avancer-reculer, ou une combinaison des deux, ne donnent toujours qu'un espace de commande de dimension 2. Quand on dispose de moins de manœuvres de base que l'espace que l'on peut atteindre n'a de dimensions, on dit que le mouvement est sous-actionné. Le phénomène mathématique porte le nom de non-holonomie (l'holonomie, c'est quand tous les chemins sont permis). La nage d'un poisson, la marche d'un animal relèvent de la non-holonomie dans l'espace des formes.
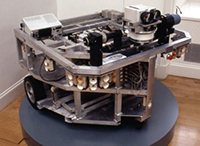 Hilare, le premier robot mobile français, promu par Georges Giralt à la fin des années 1970.
Hilare, le premier robot mobile français, promu par Georges Giralt à la fin des années 1970.
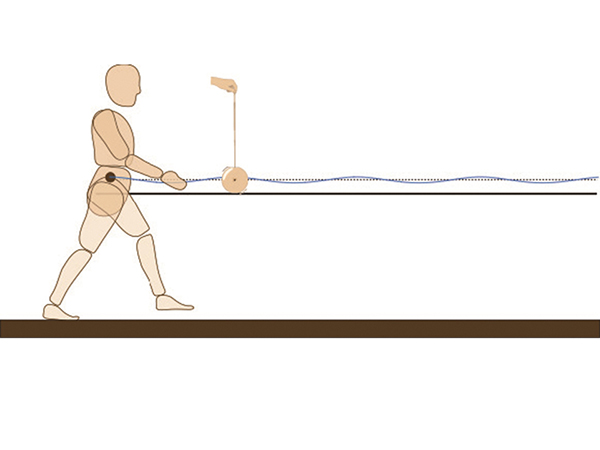
Où on est-on aujourd'hui ? Un groupe de chercheurs du LAAS travaille sur la marche humaine. Et ils y ont retrouvé… la roue ! Le centre de gravité du marcheur décrit très précisément une hypocycloïde (la courbe que décrit un point d'une roue qui n'est ni au centre, ni sur le bord). D'où l'idée audacieuse que le cerveau n'aurait qu'à contrôler le mouvement de cette roue virtuelle (la translation), laissant le mouvement périodique des jambes à des fonctions de bas niveau…
Propos recueillis par A.B.
Ce texte est issu de la conférence donnée par Jean-Paul Laumond, le mercredi 18 janvier 2017 à la Bibliothèque nationale de France dans le cadre du cycle "Un texte, un mathématicien".
Jean-Paul Laumond - "Poincaré et la robotique : la géométrie pour agir par le mouvement" from Soc. Mathématique de France on Vimeo.